






 Microsmeta Podcast
Microsmeta Podcast Feed Atom 0.3
Feed Atom 0.3 Visite guidate a Roma
Visite guidate a Roma








 Think different!
Think different!











\\ Home Page : Articolo
HANNO SUPPORTATO DIGITAL WORLDS INVIANDO PRODOTTI DA RECENSIRE
 |
|
|
 |
|
Robotica antropomorfa: i colli di bottiglia tecnologici verso il mercato di massa
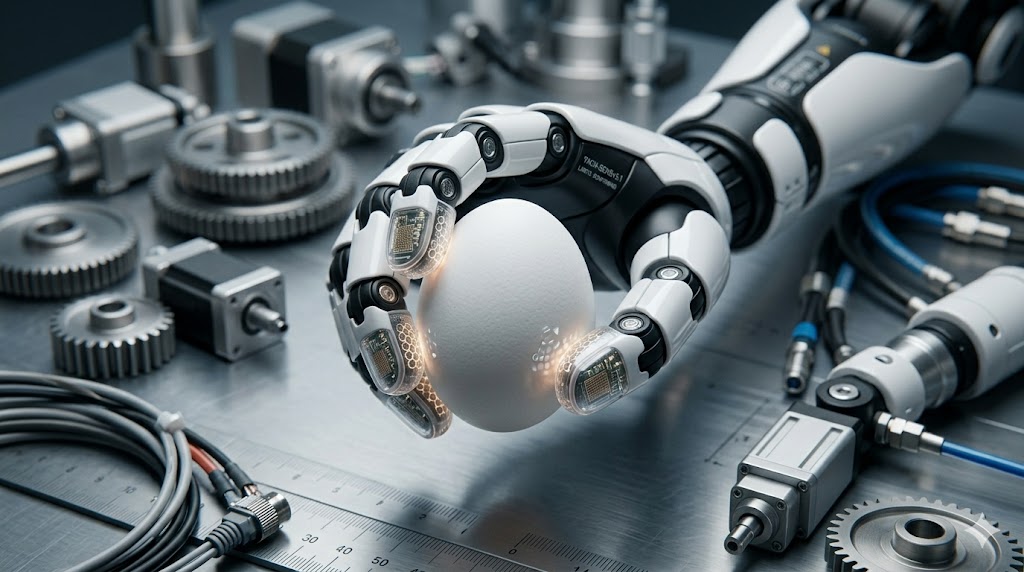
Mano robotica che afferra un uovo senza romperlo, con sensori tattili
Nonostante i progressi, i robot umanoidi faticano a entrare nelle case a causa di limiti nella manipolazione fine, nella contestualizzazione cognitiva e nell'accettazione psicologica. La robotica morbida e l'uncanny valley sono le frontiere da superare. LEGGI TUTTO L'ARTICOLO
Bonus Video
La transizione storica dall'automa meccanico all'androide moderno
Il sogno di ricreare artificialmente la forma e i movimenti del corpo umano affonda le sue radici nella storia della scienza e dell'arte. Già nel 1495, Leonardo da Vinci progettò un automa meccanico dalle sembianze di un cavaliere teutonico, capace di muovere le braccia e brandire una spada grazie a un complesso sistema interno di pulegge, corde e ingranaggi metallici. Tuttavia, la robotica antropomorfa moderna ha dovuto attendere lo sviluppo dell'elettronica e dell'informatica per uscire dal campo della meraviglia meccanica ed entrare in quello dell'utilità pratica. Nei settori industriali, i bracci robotici antropomorfi hanno trovato un impiego massiccio grazie alla loro straordinaria precisione e alla capacità di operare ad altissima velocità all'interno di ambienti controllati, dove un integratore di sistema si occupa di programmare ogni singolo movimento in funzione di un compito fisso. La vera sfida tecnologica del ventunesimo secolo consiste nell'affrancare il robot dall'ambiente industriale per inserirlo negli spazi flessibili e imprevedibili della vita quotidiana delle persone.
La manipolazione fine e la fisica dei materiali flessibili
Il primo e più evidente ostacolo ingegneristico che impedisce la diffusione di massa dei robot umanoidi risiede nel divario insuperabile tra la motricità globale e la manipolazione fine. Sebbene modelli d'avanguardia come l'Atlas di Boston Dynamics o lo stesso Optimus di Tesla abbiano dimostrato straordinarie capacità di equilibrio dinamico, corsa e salti acrobatici, la loro destrezza manuale rimane rudimentale rispetto a quella biologica. La mano umana è un capolavoro di biomeccanica, dotata di una densità di recettori tattili che consentono di percepire istantaneamente la consistenza, il peso, la temperatura e lo scivolamento di un oggetto. Replicare questa sensibilità in una mano robotica richiede lo sviluppo di sensori di pressione flessibili e di attuatori elettromeccanici miniaturizzati capaci di modulare la forza impressa in modo millimetrico. Per superare questo limite, gli ingegneri stanno studiando la cosiddetta "soft robotics" (robotica morbida), una disciplina che abbandona le leghe metalliche rigide per impiegare polimeri elastici e materiali autoriparanti capaci di imitare la flessibilità dei muscoli, della cartilagine e dei tendini biologici, consentendo un'interazione fisica sicura con l'uomo.
| Catena del processo di presa robotica | ||
|---|---|---|
| Presenza di un Oggetto | → | RICONOSCIMENTO VISIVO (Eseguito con successo dall'IA) |
| ↓ | ||
| COMPRENSIONE DEL CONTESTO (Grave limite attuale) | → | Perché devo afferrare l'oggetto? Devo afferrarlo dal manico o dal corpo? |
| ↓ | ||
| MODULAZIONE DELLA PRESA (Mancanza di destrezza fine) | → | Rischio di rottura di materiali fragili |
La barriera cognitiva della contestualizzazione fisica e l'uncanny valley
Al di là delle sfide materiali ed energetiche, il vero collo di bottiglia che separa l'umanoide dal mercato di massa è di natura cognitiva. Un computer può sconfiggere un campione mondiale di scacchi calcolando milioni di mosse al secondo, ma un robot fatica a compiere un gesto apparentemente banale come sparecchiare una tavola. Questo accade perché i robot mancano di senso comune e di comprensione del contesto d'uso. Ad esempio, di fronte a una tazza di ceramica, un robot non è in grado di comprendere autonomamente se deve afferrarla saldamente per il corpo per spostarla, oppure stringerne delicatamente il manico per porgerla a una persona senza scottarsi, a meno che non sia supportato da un software specifico per ogni singola variazione d'uso. L'ambiente domestico è caratterizzato da un caos geometrico costante che richiede una continua e istantanea ricalibrazione dell'azione fisica. A questo limite cognitivo si aggiunge l'ostacolo psicologico della "valle perturbante" (uncanny valley): la tendenza degli esseri umani a provare una forte sensazione di rifiuto e inquietudine di fronte a macchine che imitano in modo quasi perfetto, ma non del tutto fedele, i movimenti e l'aspetto dei volti umani, imponendo ai produttori scelte estetiche marcatamente artificiali per facilitare l'accettazione sociale del robot.
Il percorso verso un robot domestico utile e accettato è ancora lungo. Superare i colli di bottiglia della manipolazione fine e della comprensione contestuale richiederà anni di ricerca interdisciplinare.
 Articolo
Articolo  Storico
Storico Stampa
StampaNessun commento trovato.
Disclaimer
L'indirizzo IP del mittente viene registrato, in ogni caso si raccomanda la buona educazione.
L'indirizzo IP del mittente viene registrato, in ogni caso si raccomanda la buona educazione.