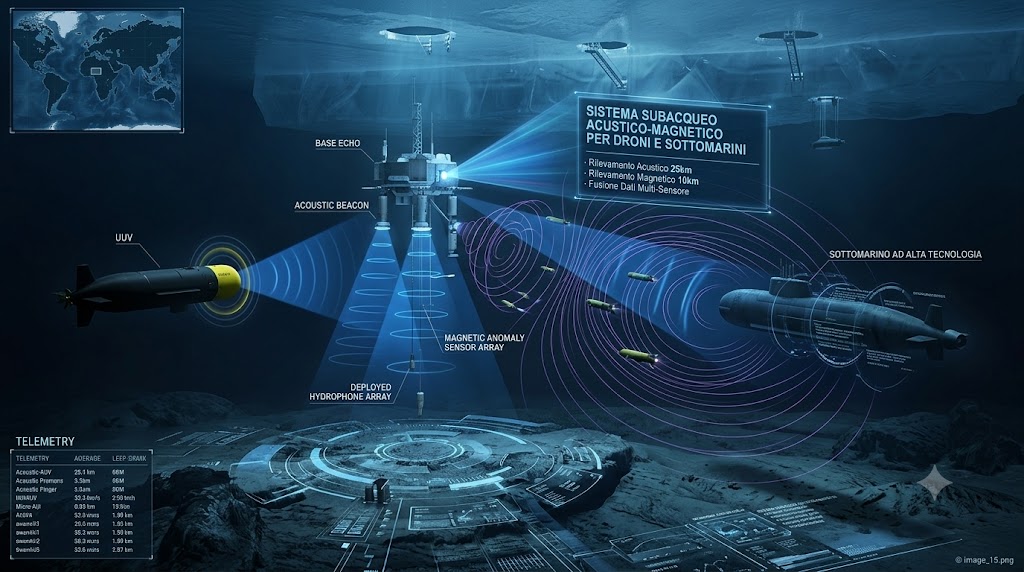
Sistema acustico-magnetico per la geolocalizzazione subacquea
Le infrastrutture di posizionamento subacqueo a lungo raggio combinano onde acustiche a bassa frequenza e mappe magnetiche del fondale per localizzare droni e sottomarini senza ricorrere al GPS, rivoluzionando le operazioni in ambienti marini profondi. LEGGI TUTTO L'ARTICOLO.
🎧 Ascolta questo articolo
Bonus Video
Principi fisici: modulazione acustica a bassa frequenza e propagazione
La localizzazione subacquea a lungo raggio si fonda sulla propagazione del suono nell'acqua, un mezzo che attenua le onde elettromagnetiche ma consente a quelle acustiche di viaggiare per migliaia di chilometri se impiegate a frequenze opportune. Le infrastrutture moderne utilizzano segnali acustici con frequenze comprese tra 100 e 1000 Hz, dove l'assorbimento è minimo e la propagazione può avvenire attraverso il canale SOFAR, uno strato oceanico profondo che funge da guida d'onda naturale. La modulazione impiegata è spesso di tipo phase-shift keying (PSK) o frequency-shift keying (FSK) a banda ultralarga, combinata con tecniche di time reversal per focalizzare l'energia e contrastare il multipath. I trasmettitori, ancorati sul fondale o sospesi a boe, emettono sequenze codificate di impulsi che vengono ricevute da idrofoni a bordo dei veicoli sottomarini. Il tempo di volo del segnale, misurato con precisione submicrosecondo grazie a orologi atomici miniaturizzati, fornisce una stima della distanza tra trasmettitore e ricevitore. Tuttavia, la velocità del suono in acqua non è costante: dipende da temperatura, salinità e pressione, che formano profili variabili con la profondità e la stagione. Per questo, i sistemi avanzati integrano modelli oceanografici in tempo reale alimentati da sensori distribuiti, che correggono le distorsioni di propagazione. L'uso di array di trasmettitori consente di determinare la posizione tramite multilaterazione iperbolica, simile al GPS ma in un dominio acustico. A differenza dei sistemi a corto raggio (USBL o LBL), che richiedono una densa rete di transponder, le nuove infrastrutture a lungo raggio permettono di coprire bacini oceanici con un numero ridotto di stazioni, riducendo i costi di installazione e manutenzione. La robustezza del segnale è aumentata dall'impiego di codici a spettro espanso, che mascherano la trasmissione e la rendono resistente alle interferenze e al jamming. Le ricerche più recenti esplorano l'uso di segnali caotici e di modulazione adattativa, capaci di variare parametri in base alle condizioni del canale, massimizzando la portata e la precisione.
Rilevamento magnetico del fondale: mappe e correlazione
Parallelamente all'acustica, il posizionamento si avvale di mappe magnetiche del fondale oceanico. Il campo magnetico terrestre presenta anomalie locali dovute alla composizione mineralogica delle rocce e alla tettonica delle placche; queste anomalie, una volta rilevate con magnetometri ad alta sensibilità, costituiscono un'impronta unica di ogni luogo sottomarino. I veicoli autonomi (AUV) e i sottomarini sono equipaggiati con magnetometri fluxgate o a pompaggio ottico, che registrano il campo magnetico totale mentre navigano. I dati acquisiti vengono confrontati in tempo reale con un database di mappe geomagnetiche ad alta risoluzione, costruito mediante campagne di rilevamento con navi oceanografiche e droni di superficie. L'algoritmo di matching sfrutta tecniche di correlazione incrociata e filtri di Kalman estesi per determinare la posizione più probabile, anche in assenza di segnali acustici. Questo approccio è particolarmente utile in zone dove il rumore acustico è elevato o in cui la propagazione del suono è disturbata da stratificazioni termiche. La combinazione dei due metodi, acustico e magnetico, offre un sistema ridondante e resiliente: quando l'acustica è degradata, il magnetico fornisce una stima di posizione, e viceversa. Inoltre, le anomalie magnetiche possono essere utilizzate come punti di riferimento assoluti, analoghi a landmark visivi, per correggere la deriva dei sistemi di navigazione inerziale (INS). La realizzazione delle mappe richiede l'impiego di modelli matematici che tengano conto delle variazioni temporali del campo magnetico (variazione secolare e tempeste solari), compensandole mediante stazioni di riferimento a terra o boe magnetiche. I progressi nella sensoristica quantistica, con i magnetometri a diamante con vacanze di azoto, promettono sensibilità ancora maggiori, aprendo la strada a mappe con una risoluzione inferiore al metro, indispensabili per operazioni di precisione in prossimità di infrastrutture critiche sottomarine.
Integrazione sensoristica per droni AUV e sottomarini
I moderni veicoli sottomarini integrano i dati acustici e magnetici con altre fonti di navigazione in un'architettura di sensor fusion. L'unità di misura inerziale (IMU) fornisce accelerazioni e velocità angolari, mentre il doppler velocity log (DVL) misura la velocità rispetto al fondale. Un filtro di Kalman esteso o un particle filter combina queste informazioni con le stime di posizione acustica e magnetica, producendo una soluzione di navigazione continua e robusta. L'infrastruttura di posizionamento trasmette anche dati di correzione differenziale, simili al DGPS, che permettono di migliorare ulteriormente l'accuratezza. A bordo, il sistema di elaborazione confronta le mappe pre-caricate con i rilievi in tempo reale, eseguendo algoritmi di simultaneous localization and mapping (SLAM) che aggiornano le mappe stesse se vengono rilevate discrepanze, ad esempio dopo eventi sismici o frane sottomarine. Le comunicazioni con la centrale avvengono tramite modem acustici a bassa velocità o, quando il veicolo emerge, via radio o satellite, permettendo il monitoraggio remoto di intere flotte. Le sfide riguardano la sincronizzazione temporale: i segnali acustici soffrono di latenze elevate (fino a diversi secondi su lunghe distanze), che devono essere compensate con modelli predittivi. L'integrazione con sensori ottici e sonar a scansione laterale arricchisce il quadro, consentendo la mappatura simultanea del fondale e la navigazione autonoma in ambienti complessi, come canyon sottomarini o sotto il ghiaccio polare. L'alimentazione dei sistemi è garantita da batterie ad alta densità energetica o, per stazioni fisse, da celle a combustibile o cavi sottomarini, assicurando autonomie di mesi.
Applicazioni militari, ricerca oceanografica e industria offshore
Le applicazioni di queste infrastrutture sono molteplici. In ambito militare, consentono ai sottomarini di navigare in modo occulto senza dover emergere per ricevere segnali GPS, mantenendo il vantaggio della furtività. I droni AUV possono pattugliare ampie aree per la sorveglianza di confini marittimi, la rilevazione di mine o la protezione di porti. Nella ricerca oceanografica, permettono il monitoraggio a lungo termine di parametri ambientali come correnti, temperatura e acidificazione, con la capacità di geo-referenziare ogni misura con precisione assoluta. Le spedizioni scientifiche possono dispiegare reti di sensori acustico-magnetici per studiare la dinamica delle dorsali oceaniche o la migrazione di specie pelagiche. Nell'industria offshore, il posizionamento di precisione è cruciale per l'installazione e la manutenzione di piattaforme petrolifere, condotte e parchi eolici galleggianti, dove errori di pochi metri possono causare danni ingenti. I robot sottomarini, guidati da queste infrastrutture, eseguono ispezioni visive e rilievi batimetrici con un grado di automazione sempre maggiore, riducendo il rischio per i subacquei e i costi operativi. Anche il settore delle telecomunicazioni trae beneficio, poichè i cavi sottomarini possono essere monitorati e riparati con l'ausilio di veicoli localizzati con precisione centimetrica. La cooperazione internazionale sta portando alla definizione di standard aperti per l'interoperabilità, affinchè mezzi di diverse nazioni e produttori possano condividere la stessa rete di posizionamento.
Sfide tecniche: attenuazione, multipath e rumore ambientale
Nonostante i progressi, rimangono sfide significative. L'attenuazione del suono in acqua, che cresce con la frequenza, limita la portata effettiva: a 100 Hz si possono coprire migliaia di chilometri, ma la larghezza di banda disponibile per i dati è esigua, richiedendo schemi di compressione e codifica efficienti. Il multipath, causato dalle riflessioni sul fondale e sulla superficie, introduce interferenze che degradano la precisione, sebbene tecniche di equalizzazione adattativa e modulazione OFDM aiutino a mitigarlo. Il rumore ambientale, generato da pioggia, traffico navale e attività biologica (come il canto dei cetacei), può mascherare i segnali di posizionamento, rendendo necessario l'uso di filtri adattivi e di algoritmi di rilevazione robusti. La variazione termica stagionale crea zone d'ombra acustica che richiedono una pianificazione dinamica della geometria dei trasmettitori. La deriva degli orologi atomici, seppur minima, richiede sincronizzazioni periodiche tramite segnali di riferimento. Infine, la miniaturizzazione dei componenti per adattarli a droni sempre più piccoli rimane un obiettivo di ricerca attivo, con progressi nei MEMS e nella microelettronica che promettono di superare questi limiti entro il prossimo decennio.
Le infrastrutture di posizionamento subacqueo acustico-magnetico segnano un salto quantico nella capacità di operare negli abissi, rendendo trasparenti agli occhi dell'uomo anche le più remote distese oceaniche.