Mano robotica ADAPT che apprende movimenti autonomi
Una mano robotica che sviluppa autonomamente i propri movimenti, senza essere programmata per ogni singolo gesto. Non fantascienza: è la frontiera attuale della ricerca in robotica fisica, dove l'intelligenza artificiale incontra la flessibilità dei materiali per replicare qualcosa che gli esseri umani fanno senza pensarci. LEGGI TUTTO L'ARTICOLO.
🎧 Ascolta questo articolo
Bonus Video
Il problema della presa: semplice per gli umani, difficilissimo per i robot
Quando allungate la mano per raccogliere una bottiglia d'acqua, non avete bisogno di conoscere la sua esatta posizione nello spazio. Non calcolate la distanza con precisione millimetrica, non programmate la forza di ogni singolo dito, non elaborate un algoritmo di presa prima di agire. Lo fate e basta, con una naturalezza che deriva da anni di apprendimento motorio e da una straordinaria flessibilità del sistema muscolo-scheletrico della mano.
Per un robot, fare la stessa cosa è enormemente più difficile. La robotica tradizionale risolve il problema della presa con la programmazione rigida: si codificano in anticipo ogni posizione, ogni angolo, ogni forza necessaria per afferrare ogni specifico oggetto. Questo approccio funziona alla perfezione in ambienti controllati le catene di montaggio industriali, dove gli oggetti sono sempre identici e sempre nella stessa posizione ma fallisce nel momento in cui l'ambiente diventa imprevedibile, come lo è quasi sempre il mondo reale.
Il passo successivo, che i ricercatori stanno esplorando con risultati sempre più interessanti, è costruire robot che si adattino all'incertezza come fanno gli esseri umani: non attraverso la precisione del calcolo ma attraverso la flessibilità della struttura fisica e la capacità di apprendimento autonomo.
ADAPT: la mano che impara dalla flessibilità
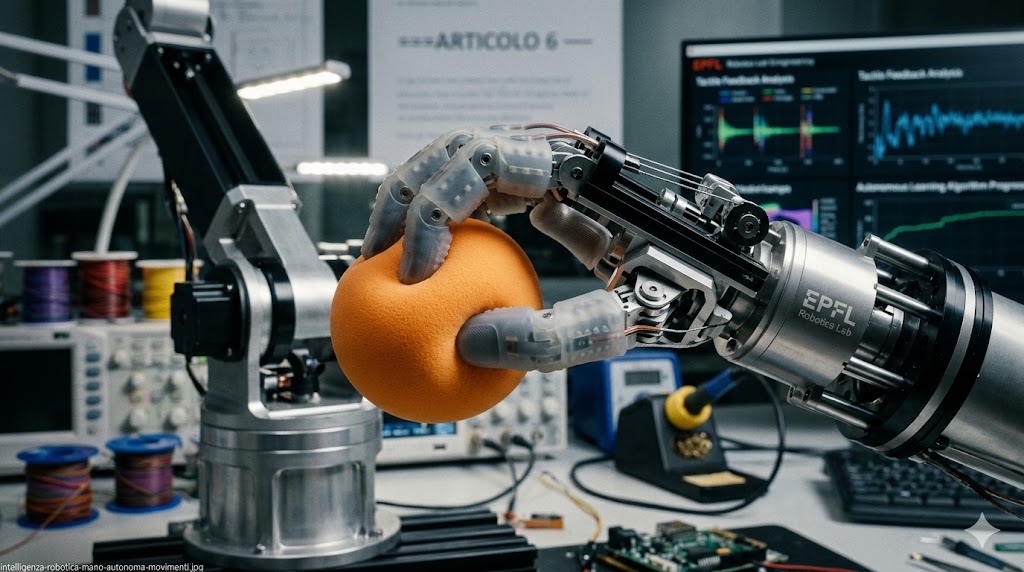
Tra i progetti più avanzati in questo campo c'è ADAPT, acronimo di Adaptive Dexterous Anthropomorphic Programmable sTiffness, sviluppato dal laboratorio CREATE Lab dell'EPFL, il Politecnico federale di Losanna. La mano robotica ADAPT è costruita con materiali flessibili in particolare una pelle di silicone e utilizza strutture meccaniche che le permettono di adattarsi alla forma degli oggetti senza aver bisogno di conoscerne in anticipo la geometria esatta.
In una serie di esperimenti, ADAPT è riuscita ad afferrare ventiquattro oggetti diversi con un tasso di successo del novantaquattro per cento, eseguendo movimenti di presa auto-organizzati con una somiglianza del sessantotto per cento rispetto ai movimenti della mano umana. Il ricercatore Kai Junge, che ha guidato il progetto, ha precisato che l'obiettivo non era replicare esattamente la mano umana, ma dimostrare quanto una struttura flessibile possa raggiungere anche senza controllo computazionale fine. Il risultato, ottenuto grazie alla sola flessibilità dei materiali, ha aperto la strada alla fase successiva: integrare nella mano sensori di pressione sulla pelle di silicone e algoritmi di intelligenza artificiale per il feedback in tempo reale.
Questo approccio flessibilità strutturale più intelligenza artificiale è considerato dai ricercatori uno dei più promettenti per costruire robot capaci di operare in ambienti non strutturati, quelli cioè dove non tutto è prevedibile e controllato.
La Physical AI: quando l'intelligenza entra nel corpo del robot
Il campo che studia l'interazione tra intelligenza artificiale e sistemi fisici ha ricevuto negli ultimi anni un nome specifico: Physical AI, o intelligenza artificiale fisica. La Physical AI riguarda robot umanoidi, veicoli a guida autonoma, robot di magazzino, droni e macchine industriali capaci non solo di eseguire istruzioni programmate ma di osservare l'ambiente, comprenderlo e compiere azioni adattive.
La differenza rispetto alla robotica tradizionale è tutta nella capacità di apprendimento. Fino a pochi anni fa un robot industriale ripeteva movimenti rigidamente codificati: ogni variazione richiedeva una riprogrammazione esplicita. Oggi i modelli fondazionali addestrati su video, simulazioni e dati di teleoperazione permettono alla macchina di apprendere da esempi, di generalizzare da situazioni già viste a situazioni nuove, di adattare il proprio comportamento in tempo reale.
Le tecnologie che convergono in questo campo sono diverse: visione artificiale per guidare i movimenti con precisione, reinforcement learning per apprendere attraverso tentativi ed errori, elaborazione del linguaggio naturale per interagire con gli esseri umani, modelli linguistici avanzati per supportare decisioni complesse. La combinazione di queste tecnologie sta dando vita a robot sempre più intelligenti e autonomi, capaci di operare in ambienti dove prima avrebbero fallito.
Il futuro degli umanoidi e le sfide che restano
Il mercato della robotica umanoide quella che comprende robot con forma e movimento simili a quelli umani è in crescita rapida. Le stime parlano di un valore complessivo che potrebbe superare i trenta miliardi di dollari entro il duemilatrenta, sostenuto dalla convergenza tra hardware avanzato e Physical AI. Aziende come Boston Dynamics, Figure, Agility Robotics e Tesla stanno sviluppando umanoidi per applicazioni industriali e logistiche. In Cina, decine di startup stanno emergendo in questo settore con ritmi di sviluppo molto veloci.
Ma le sfide che restano da superare sono ancora significative. La prima è la sicurezza: un robot che interagisce fisicamente con esseri umani deve essere in grado di evitare collisioni, regolare la forza della propria presa, fermarsi immediatamente in caso di situazioni impreviste. La seconda è l'efficienza energetica: i robot umanoidi attuali consumano molta più energia di quanto possano produrre in utilità, un problema che limita la durata operativa e l'autonomia. La terza è il costo: produrre robot con la destrezza e la flessibilità necessarie per lavorare accanto agli esseri umani richiede componenti costosi e processi di assemblaggio complessi.
La mano robotica che sviluppa movimenti autonomi è, in questo quadro, molto più di una curiosità scientifica. È un indicatore della direzione in cui si sta muovendo l'intera robotica: verso macchine che non aspettano di essere programmate per ogni singola situazione, ma che imparano, si adattano e nel senso più letterale del termine si danno una mossa da sole.
La mano robotica che impara da sola è il simbolo di un futuro in cui le macchine si adatteranno al mondo reale con la flessibilità degli esseri umani.